Spin representations, 1D, 2D, 3D, Weight modules, Modeling divisions
Representing {$n$}-Dimensional Special Orthogonal Lie Algebras
Focusing, for now, on the spin representations of the special orthogonal Lie algebra {$\frak{so}$}{$(n)$}. See also the tensorial representations of the classical Lie groups.
Orthogonal group {$O(n)$}
The orthogonal group {$O(n)$} consists of isometries (distance-preserving transformations) of an {$n$}-dimensional Euclidean space that preserve the origin. An orthogonal matrix {$Q$} preserves the length of any vector {$v$}, namely {$\langle v,v\rangle=v^Tv=(Qv)^T(Qv)=v^TQ^TQv$}, which is true if and only if {$Q^TQ=I$}.
More generally, given a symmetric bilinear form or a quadratic form, the orthogonal group of the form is the group of invertible linear maps that preserve the form. {$\langle v,v\rangle=v^TBv=(Qv)^TB(Qv)=v^TQ^TBQv$}, which is true if and only if {$Q^TBQ=I$}, in other words, {$QQ^T=B^{-1}$}, and again {$Q^TQ=Q^{-1}B^{-1}Q$}.
Special orthogonal lie algebra {$\frak{so}$}{$(n)$}
For a matrix Lie group {$G$}, the exponential map {$\textrm{exp}:\frak{g}\rightarrow G$} can be defined concretely as {$\textrm{exp}(X)=\sum_{k=0}^\infty \frac{X^k}{k!}$}. The Lie algebra for the orthogonal group, and likewise the special orthogonal group and the spin group, is given by {$n\times n$} matrices {$X$} such that {$e^x\in O(n)$}, which means {$(e^X)^T=(e^X)^{-1}$}. We have {$X^T=-X$}. These are the skew-symmetric matrices {$X$}.
The skew-symmetric matrices form a Lie algebra. Suppose {$X,Y$} are skew-symmetric. Then
{$ [X,Y]^T=(XY-YX)^T=(XY)^T-(YX)^T=Y^TX^T-X^TY^T=(-Y)(-X)-(-X)(-Y)=YX-XY=[Y,X]=-[X,Y] $}.
Thus {$ [X,Y] $} is likewise skew-symmetric.
Skew-symmetric means that if we pick out two dimensions, then they need to be linearly independent. We are focusing on linear independence.
It means that if we focus on two dimensions, we will have rotation by i.
It means that the Lie algebra expresses the smooth action (rotation) in terms of relationships between discrete dimensions. So it expresses continuity in terms of discreteness.
The Lie algebra relates the Lie group element {$I$} with its tangent plane, which is orthogonal to it. For example, in {$U(1)$} it relates {$1$} and {$it$}.
Basis for {$\frak{so}$}{$(n)$}
A basis for {$\frak{so}$}{$(n)$} is given by matrices of the form {$M(i,j)=\begin{pmatrix} & & & \\ & & 1_{ij} & \\ & -1_{ji} & & \\ & & & \\ \end{pmatrix}$}. Let {$e_j$} be the related basis for {$V$} so that any vector {$v\in V$} can be written as {$v=\sum_{j=1}^n v_je_j$}. Consider how {$M(i,j)$} acts on {$v_{ij}=v_ie_i + v_je_j$} as a ninety-degree rotation, sending it to {$M(i,j)v_{ij}=v_je_i - v_ie_j$}:
{$\begin{pmatrix} & & & \\ & & 1_{ij} & \\ & -1_{ji} & & \\ & & & \\ \end{pmatrix}\begin{pmatrix} \\ v_i \\ v_j \\ \\ \end{pmatrix} = \begin{pmatrix} \\ v_j \\ -v_i \\ \\ \end{pmatrix}$}
This can be understood as multiplication by the imaginary number in the relevant complex plane. Moreover, we can understand this action as sending {$v=\sum_{j=1}^n v_je_j$} to {$v_je_i - v_ie_j = \langle e_j,v\rangle e_i - \langle e_i,v\rangle e_j$}.
Note that if {$i<j$} then {$M(j,i)$} looks like
{$M(j,i)=\begin{pmatrix} & & & \\ & & -1_{ij} & \\ & 1_{ji} & & \\ & & & \\ \end{pmatrix}$}
We see that {$M(i,j)=-M(j,i)$}.
Can we define {$M(i,i)$}? We would have to have {$1_{ii} = -1_{ii} = 0$} so that {$M(i,i)=0$}.
Lie bracket
We can calculate the commutator:
{$ [M(i,j), M(k,l)] = \begin{pmatrix} & & & \\ & & 1_{ij} & \\ & -1_{ji} & & \\ & & & \\ \end{pmatrix}\begin{pmatrix} & & & \\ & & 1_{kl} & \\ & -1_{lk} & & \\ & & & \\ \end{pmatrix} - \begin{pmatrix} & & & \\ & & 1_{kl} & \\ & -1_{lk} & & \\ & & & \\ \end{pmatrix}\begin{pmatrix} & & & \\ & & 1_{ij} & \\ & -1_{ji} & & \\ & & & \\ \end{pmatrix}$}
{$ [M(i,j), M(i,j)] = 0 $}
{$ [M(i,j), M(k,l)] = 0 $} if {$i\neq k,l$} and {$j\neq k,l$}
Note that {$1_{ij}1_{kl}=1_{il}$} if {$j=k$} and {$0$} otherwise.
{$ [M(i,j), M(j,l)] = (1_{ij}-1_{ji})(1_{jl}-1_{lj}) - (1_{jl}-1_{lj})(1_{ij}-1_{ji}) = 1_{ij}1_{jl} - 1_{lj}1_{ji} = 1_{il} - 1_{li} = M(i,l)\quad $} and note here if {$l=i$}, we have {$ [M(i,j), M(j,i)] = 0$}
{$ [M(i,j), M(j,l)] = \begin{pmatrix} & & & \\ & & 1_{ij} & \\ & -1_{ji} & & \\ & & & \\ \end{pmatrix}\begin{pmatrix} & & & \\ & & 1_{jl} & \\ & -1_{lj} & & \\ & & & \\ \end{pmatrix} - \begin{pmatrix} & & & \\ & & 1_{jl} & \\ & -1_{lj} & & \\ & & & \\ \end{pmatrix}\begin{pmatrix} & & & \\ & & 1_{ij} & \\ & -1_{ji} & & \\ & & & \\ \end{pmatrix}$}
We see that the commutator of two generators {$ [M(i,j), M(k,l)]$} yields 0 or a generator. Thus {$\frak{so}$}{$(n)$} is closed under the commutator and it can serve as the Lie bracket.
Spin algebra
Let us now show that {$\frak{so}$}{$(n)$} is isomorphic to the spin algebra {$\frak{spin}$}{$(n)$}. This is true both for the real value case, {$\frak{so}$}{$(n,\mathbb{R})\cong \frak{spin}$}{$(n)$} and the complexified case, {$\frak{so}$}{$(n,\mathbb{C})\cong \frak{spin}$}{$^\mathbb{C}(n)$}. Practically speaking, this is the matter of whether the entries of the special orthogonal matrices have real or complex values, and whether the Clifford algebra {$Cl(V,Q)$}, within which the spin algebra lies, is constructed on a real or complex vector space {$V$}.
Within the complex Clifford algebra {$Cl(V,Q)$} with generators {$e_1,\cdots,e_n$}, {$e_j^2=1$}, consider the vector subspace {$Cl^2(V,Q)$} of bivectors with generators {$e_je_k$} where {$1\leq j<k\leq n$}. The spin algebra is the {$\frak{spin}$}{$(n)$} is this vector subspace {$Cl^2(V,Q)$} with the commutator as the Lie bracket.
Note that the commutator of two bivector generators is {$ [e_ie_j, e_ke_l]=e_ie_je_ke_l - e_ke_le_ie_j$}. The value depends on whether any two generators are equal, in which case they commute, or whether they are not equal, in which case they anticommute. Much as above, if {$i=k$} and {$j=l$}, then the commutator is {$0$}. If {$i\neq k,l$} and {$j\neq k,l$}, then it is likewise {$0$}. If {$i\neq l$} and {$j=k$}, then {$e_j^2=1$} means that {$ [e_ie_j, e_je_k] = e_ie_je_je_k - e_je_ke_ie_j = e_ie_k - e_ke_i = 2e_ie_k$}, and we can arrive at this equation (plus or minus) in the other cases where only one of {$i,j$} equals {$k$} or {$l$} by making use of the facts that {$e_j e_i=-e_i e_j, e_l e_k=-e_ke_l$}. Note that the commutator of two bivector generators is either a bivector or zero, which indicates that the Lie bracket is closed on the spin algebra.
The commutators of the spin algebra and the special orthogonal algebra differ by a factor of {$2$}. This is because the spin orthogonal algebra arrives at the same result in two different ways, {$e_i e_k = e_i\ e_j e_j e_k$} and {$-e_ke_i=-e_ke_je_je_i$}. Whereas the special orthogonal algebra arrives at the result by expressing the information of the matrix {$M(i,j)$} in two different ways {$1_{ij}-1_{ji}$}, which upon multiplying with {$M(j,k)$} and its two ways {$1_{jk}-1_{kj}$}, both forwards and backwards in the commutator, yields eight ways from which two survive. Namely, {$M(i,k)=(1_{ij}-1_{ji})(1_{jk}-1_{kj}) - (1_{jk}-1_{kj})(1_{ij}-1_{ji}) = 1_{ij}1_{jk}-1_{kj}1_{ji}$}.
We have an isomorphism {$\frak{so}$}{$(n)\cong\frak{spin}$}{$(n)$} by determining a proper scaling {$C$} such that {$e_ie_j\leftrightarrow CM(i,j)$}. Note that {$ [e_ie_j,e_je_k]=2e_ie_k\leftrightarrow 2CM(i,k)$}. Whereas {$ [e_ie_j,e_je_k]\leftrightarrow [CM(i,j),CM(j,k)]=C^2[M(i,j),M(j,k)]=C^2M(i,k)$}. Thus {$2CM(i,k)=C^2M(i,k)$} yielding {$C=2$}. The map {$e_ie_j\leftrightarrow 2M(i,j)$} is a Lie algebra isomorphism.
These two Lie algebras are isomorphic but the factor of {$2$} becomes significant when we exponentiate to get the corresponding Lie groups. This is why the spin group spins twice as much as the special orthogonal group, which is to say, is a double cover. I need to study the context for these exponential maps which distinguish the two groups. I need to understand how that makes for different algebraic topologies. And I want to understand the distinction in how information gets processed in the combinatorics above as the ultimate reason for the distinction between the spin group and the special orthogonal group.
Given two dimensions {$i$} and {$j$}, as with a rotation, they can be considered ordered {$i<j$} and read in two different ways (left-to-right or right-to-left), or they can be read in a single way as when they are not ordered. When a vector is rotated, it can be considered to have a "face" (oriented front-inside or back-outside with regard to the center of a circle) or a "head" (oriented up or down with regard to a tape) that reads left-to-right when oriented one way and right-to-left when oriented the other way. Reading one way (left-to-right) positions it so that it then reads the opposite way (right-to-left). Thus it is oscillating between two states. We, in our ignorance, see it as returning to one state, with perhaps a property switching, but it sees itself as oscillating between two different extremes, moving between the far left and the far right.
The information {$i<j$} is written by the spin algebra implicitly, geometrically, {$e_i\wedge e_j$}, where {$i<j$} is read from left-to-right and {$j>i$} is read from right-to-left. Whereas the special orthogonal group writes it explicitly, algebraically, with positive {$1_{ij}$} meaning {$i<j$} and negative {$-1_{ji}$} meaning {$j>i$}. It encodes both directions at once, splitting the information into these two copies. But it then fits them together in only one direction in the space in which it is embedded. Specifically, matrix multiplication connects inner links {$1_{ij}1_{jk}=1_{ik}$} but does not connect outer links: {$1_{ji}1_{kj}=0$}. It records the passage in both directions at once. This means that it oscillates between one combined state, which can be thought of as symmetrized (after labeling the sign) or anti-symmetrized (which adds the sign). Thus it is going round a circle. Algebra is what allows two different labels (positive and negative) to exist at once (as with bosons) whereas geometry enforces the distinction (as with fermions) of motions (left-to-right and right-to-left).
This is a relationship of the two minds. I also suspect that it relates to John Harland's factor of 2 between quantum and classical.
I need to understand what the commutator of the Lie algebra means for the Lie group. The negative sign in the Lie algebra means taking the inverse of the element of the Lie group, which is undoing it as an action. The compositions {$AB$} and {$A^{-1}B^{-1} = (BA)^{-1}$} consider the effects of inversion on composition, reversing the order. The commutator arises by considering the product
{$(1+a)(1+b)(1-a)(1-b)=1 + ab + ab -ba + ab + \cdots $} where {$a+b-a-b=0$} and the terms {$-a^2,-b^2$} are eliminated by higher order terms.
Cartan subalgebra
The structure of our Lie algebra is revealed by identifying a Cartan subalgebra, which is a suitable maximal abelian subalgebra. The irreducible representations of an abelian algebra must be one-dimensional. By identifying a maximal abelian algebra, we can clarify the structure that remains. Specifically, we can break down that remaining structure into weight spaces which are fixed by the Cartan subalgebra.
We want to express {$V$} as a weight module, which is to say, a decomposition of {$V$} into subspaces indexed by elements of the space {$\frak{h}^*$} of linear functionals on the Cartan subalgebra {$\frak{h}\subset \frak{so}$}{$(n)$}.
{$V=\oplus_{\lambda\in\frak{h}^*} V_\lambda$}
where {$V_\lambda = \{v\in V\;|\;[h,v]=\lambda(h)v\;$}{$\;\forall h\in\frak{h}\}$}
We want to find an element {$v$} so that all elements {$h\in\frak{h}$} send it to a scalar multiple of itself. However, as we have seen, the action {$ [M(i,j),M(j,k)]=M(i,k)$} does not fix them. We need to consider whether {$M(i,j)$} fixes combinations of elements. {$M(i,j)$} sends {$M(j,k)$} to {$M(i,k)$}, and furthermore, {$ [M(i,j),M(i,k)] = -M[(j,i),M(i,k)]=-M(j,k)$} takes us back to a scalar times {$M(j,k)$}.
So let us examine where {$M(i,j)$} sends the combination {$M(i,k)+CM(j,k)$} for a scalar {$C$}. We get {$ [M(i,j),M(i,k)+C M(j,k)]=CM(i,k)- M(j,k)$}. We want {$M(i,j)$} to fix this vector space, which means that there is a scalar {$K$} such that {$M(i,k)+C M(j,k)=K(CM(i,k)- M(j,k))$}. Thus {$1=KC$} and {$C=-K$}. Consequently, {$-C^2=1$} and we can take {$C=\mp i, K=\pm i$}. We have that {$ [M(i,j), M(i,k)\mp iM(j,k)] = \pm i(M(i,k)\; \mp \; iM(j,k))$}. We can rewrite this as {$ [M(i,j),M(i,k)\pm iM(k,j)]=\pm i(M(i,k)\pm iM(k,j))$}.
For {$\frak{h}$}, we want a maximal set of commuting elements. We do have such a set of {$M(j,k)$} on the anti-diagonal, namely: {$M(1,n),M(2,n-1),\cdots ,M(j,n+1-j),\cdots$} where we insist that {$j<n+1-j$}, which is to say, {$j<\frac{n+1}{2}$}, so that these elements are all independent. We write {$H_j=M(j,n+1-j)$}. Note that {$ [H_j,H_k]=0$} if {$j\neq k, j\neq n+1-k$}. The {$H_j$} with {$ 1\leq j\leq \frac{n+1}{2}$} generate our Cartan algebra.
Weight spaces
We want to break up {$\frak{so}$}{$(n)$} into weight spaces {$U_\lambda$} that are fixed by {$ [H,_]$}.
We have shown that {$M(j,n+1-j)$} fixes the vector space generated by {$M(j,k)\;\pm\; iM(k,n+1-j)$}. Let us write {$Z_{j,k}^\pm=M(j,k) \;\pm\; iM(k,n+1-j) $} where we will assume that {$k\neq j$} to stay away from the anti-diagonal. If {$j,k<\frac{n+1}{2}$}, then {$M(j,k)$} is above the anti-diagonal and {$M(k,n+1-j)=-M(n+1-j,k)$} is below the anti-diagonal. This setup works for {$n=2m$} and when {$n=2m+1$} we need to add an extra row of zeroes and column of zeroes intersecting at the center of the matrices.
We need to consider how {$Z_{j,k}^\pm$} is affected by other elements of the Cartan algebra, notably {$H_k=M(k,n+1-k)$}. We have that
{$ [M(k,n+1-k), M(j,k)\pm i M(k,n+1-j)]=$}
{$ [M(k,n+1-k),M(j,k)]\pm i [M(k,n+1-k),M(k,n+1-j)]=$}
{$-[M(j,k),M(k,n+1-k)]\pm i[M(n+1-j,k),M(k,n+1-k)]=$}
{$-M(j,n+1-k)\pm iM(n+1-j,n+1-k)$}
and we see that this space is not kept invariant. So we should consider how the Cartan subalgebra affects a combination {$Z_{j,k}^\pm+CZ_{j,n+1-k}^\pm$} with scalar {$C$}.
{$ [M(k,n+1-k),M(j,k)]\pm i [M(k,n+1-k),M(k,n+1-j)] + [M(k,n+1-k),CM(j,n+1-k)]\pm i [M(k,n+1-k), CM(n+1-k,n+1-j)] = $}
{$ -[M(j,k),M(k,n+1-k)]\pm i [-M(n+1-k,k),M(k,n+1-j)] + C[M(j,n+1-k), M(n+1-k,k)]\pm i C[M(k,n+1-k), CM(n+1-k,n+1-j)] = $}
{$ -M(j,n+1-k)\pm i M(n+1-k,n+1-j) + CM(j,k) \pm i C M(k,n+1-j) = $}
{$ C(M(j,k)\pm i M(k,n+1-j)) - (M(j,n+1-k)\pm i M(n+1-k,n+1-j) = $}
{$ C(Z_{j,k}^\pm) - (Z_{j,n+1-k}^\pm)$}
We want this to equal {$K(Z_{j,k}^\pm + CZ_{j,n+1-k}^\pm)$}. We have {$K(Z_{j,k}^\pm + CZ_{j,n+1-k}^\pm) = C(Z_{j,k}^\pm) - (Z_{j,n+1-k}^\pm) $}. Consequently, {$K=C$}, {$KC=-1$}. Thus {$K=C=\pm i$}. We have
{$ [H_k,Z_{j,k}^\pm \pm i Z_{j,n+1-k}^\pm] = \pm i (Z_{j,k}^\pm) - Z_{j,n+1-k}^\pm = \pm i(Z_{j,k}^\pm \pm i Z_{j,n+1-k}^\pm)$}
Let us now calculate
{$ [H_j,Z_{j,k}^\pm \pm i Z_{j,n+1-k}^\pm] = $}
{$ [M(j,n+1-j),M(j,k)]\pm i [M(j,n+1-j),M(k,n+1-j)] \pm i ([M(j,n+1-j),M(j,n+1-k)]\pm i [M(j,n+1-j), M(n+1-k,n+1-j)]) = $}
{$ -[M(n+1-j,j),M(j,k)] \pm i[M(k,n+1-j),M(n+1-j,j)] \pm i [M(n+1-k,j),M(j,n+1-j)] - [M(n+1-k,n+1-j),M(n+1-j,j)] = $}
{$ -M(n+1-j,k) \pm i M(k,j) \pm i M(n+1-k,n+1-j) - M(n+1-k,j) = $}
{$ \mp i M(j,k) + M(k,n+1-j) + M(j,n+1-k) \pm i M(n+1-k,n+1-j) = $}
{$ \mp i ((M(j,k) \pm i M(k,n+1-j)) \pm i (M(j,n+1-k)\pm i M(n+1-k,n+1-j)) = $}
{$ \mp i (Z_{j,k}^\pm \pm i Z_{j,n+1-k}) $}
And we have that {$ [H_l,Z_{j,k}^\pm \pm i Z_{j,n+1-k}^\pm] = 0 $} for {$l\neq j,k,n+1-j,n+1-k$}. So we have shown that {$Z_{j,k}^\pm \pm i Z_{j,n+1-k}^\pm$} is a weight space.
Show we have all of the weight spaces.
Then specify the roots...
Roots
{$\alpha\in\frak{h}^*$} is a root of {$\frak{g}$} relative to {$\frak{h}$} if {$\alpha\neq 0$} and there exists some {$X\neq 0, X\in \frak{g}$} such that {$ [H,X]=\alpha(H)X$} for all {$H\in\frak{h}$}.
Consider {$H_i=M(i,n+1-i)$} and {$X_\pm=M(i,k)\pm i M(k,n+1-i)$}. Then
{$ [H_i,X_\pm]=[M(i,n+1-i), M(i,k)] \pm i [M(i,n+1-i), M(k,n+1-i)]$}
{$ = [M(k,i),M(i,n+1-i)] \mp i [M(i,n+1-i), M(n+1-i,k)]$}
{$ = M(k,n+1-i) \mp i M(i,k)$}
{$ = \mp i M(i,k) + M(k,n+1-i)$}
{$ = \mp i (M(i,k) \pm i M(k,n+1-i)) = \mp iX_\pm$}
which is {$-i(M(i,k)+iM(k,n+1-i))=-iX_+$} and {$i(M(i,k)-iM(k,n+1-i))=iX_-$}
So {$\alpha_{X_+}(M(i,n+1-i))=-i$} and {$\alpha_{X_-}(M(i,n+1-i))=+i$}.
And consider {$H_k=M(k,n+1-k)$}.
This brings to mind the eighth roots of unity!
For the sake of what follows, and assuming {$n=2m$}, note that we can break up the matrix into {$2\times 2$} quadrants of which the following three are relevant because in them we can have {$i\leq k$}
- {$1\leq i < k\leq m$}
- {$1\leq i \leq m < k \leq 2m$}
- {$m+1\leq i < k \leq 2m$}
Cartan algebra (standard form)
The standard way to define the Cartan algebra avoids the use of imaginary numbers but also abandons skew-symmetric matrices. The bilinear form {$B$} is no longer the identity matrix {$I$} but instead taken to be
{$B=\begin{pmatrix} 0 & I \\ I & 0 \\ \end{pmatrix}$}
This means that instead of working with vector space basis {$x_i$} such that {$\langle x_i,x_j\rangle=\delta_{ij}$}, we have a vector space basis {$a_1,\cdots, a_n$} such that {$\langle a_i,a_j \rangle=\delta_{m+i,j}$} where {$n=2m$} and if {$n=2m+1$} then we have to have an extra, unpaired basis element. Note that the elements {$a_i$} are isotropic, {$\langle a_i,a_i\rangle=0$}, and that we can break up {$V$} into two totally isotropic subspaces {$W=<a_1,\cdots,a_m>, W'=<a_{m+1},\dots,a_{2m}>$} with possibly an extra one-dimensional subspace {$U=<a_{2m+1}>$}.
This twists our skew-symmetric matrix around
from {$\begin{pmatrix} C & A \\ -A^T & D \\ \end{pmatrix}$} to {$\begin{pmatrix} A & C \\ D & -A^T \\ \end{pmatrix}$}
where matrices {$C$} and {$D$} are skew-symmetric. The chief advantage of this is that the Cartan subalgebra is no longer consists of the anti-diagonal matrices {$M(i,n+1-i)$} but now consists of the diagonal matrices {$1_{i,i}-1_{m+i,m+i}$} or, alternatively, {$1_{i,i}-1_{n+1-i,n+1-i}$}. This taps into the machinery of linear algebra for diagonalizing actions. But we also have to worry about whether our dimensions pair up {$n=2m$} or we have an extra dimension {$n=2m+1$}.
Weight spaces (standard form)
Let {$H_i=1_{i,i}-1_{n+i,n+i}$} be the generators of the Cartan subalgebra {$\frak{h}$}. Let the dual vector space {$\frak{h}^*$} be generated by {$L_j$} such that {$\langle L_j,H_i\rangle = \delta_{i,j}$}.
The eigenvectors include:
- {$a_i\wedge a_{n+j}$}, which maps to {$2X_{ij}=2(1_{i,j}-1_{n+j,n+i})$}, with root {$L_i-L_j$}
- {$a_i\wedge a_j$}, which maps to {$2X_{i,n+j}=2(1_{i,n+j}-1_{j,n+i})$}, with root {$L_i+L_j$}
- {$a_{n+i}\wedge a_{n+j}$}, which maps to {$2X_{n+i,j}=2(1_{n+i,j} - 1_{n+j,i})$}, with root {$-L_i-L_j$}
- {$a_{n+i}\wedge a_j$}, which maps to {$2X_{n+i,n+j}=2(1_{n+i,n+j}-1_{j,i})$}, with root {$-L_i+L_j$}
Explicitly,
{$ [H_i, X_{i,j}] = (L_i-L_j)(H_i)X_{i,j} = X_{i,j}$}
- {$ [1_{i,i}-1_{n+i,n+i},1_{i,j}-1_{n+j,n+i}] = (1_{i,i}-1_{n+i,n+i})(1_{i,j}-1_{n+j,n+i}) - (1_{i,j}-1_{n+j,n+i})(1_{i,i}-1_{n+i,n+i}) = 1_{i,j}-1_{n+j,n+i}$}
{$ [H_j, X_{i,j}] = (L_i-L_j)(H_j)X_{i,j} = -X_{i,j}$}
- {$ [1_{j,j}-1_{n+j,n+j},1_{i,j}-1_{n+j,n+i}] = (1_{j,j}-1_{n+j,n+j})(1_{i,j}-1_{n+j,n+i}) - (1_{i,j}-1_{n+j,n+i})(1_{j,j}-1_{n+j,n+j}) = -1_{i,j}+1_{n+j,n+i}$}
{$ [H_i, X_{i,n+j}] = (L_i+L_j)(H_i)X_{i,n+j}=X_{i,n+j}$}
- {$ [1_{i,i}-1_{n+i,n+i},1_{i,n+j}-1_{j,n+i}]=(1_{i,i}-1_{n+i,n+i})(1_{i,n+j}-1_{j,n+i})-(1_{i,n+j}-1_{j,n+i})(1_{i,i}-1_{n+i,n+i}) = 1_{i,n+j}-1_{j,n+i}$}
{$ [H_j, X_{i,n+j}] = (L_i +L_j)(H_j)X_{i,n+j}=X_{i,n+j}$}
- {$ [1_{j,j}-1_{n+j,n+j},1_{i,n+j}-1_{j,n+i}]=(1_{j,j}-1_{n+j,n+j})(1_{i,n+j}-1_{j,n+i})-(1_{i,n+j}-1_{j,n+i})(1_{j,j}-1_{n+j,n+j}) = 1_{i,n+j}-1_{j,n+i}$}
{$ [H_i, X_{n+i,j}] = (-L_i-L_j)(H_i)X_{n+i,j}=-X_{n+i,j}$}
- {$ [1_{i,i}-1_{n+i,n+i},1_{n+i,j} - 1_{n+j,i}] =(1_{i,i}-1_{n+i,n+i})(1_{n+i,j} - 1_{n+j,i}) - (1_{n+i,j} - 1_{n+j,i})(1_{i,i}-1_{n+i,n+i}) = -1_{n+i,j} + 1_{n+j,i}$}
{$ [H_j, X_{n+i,j}] = (-L_i-L_j)(H_j)X_{n+i,j} = -X_{n+i,j}$}
- {$ [1_{j,j}-1_{n+j,n+j},1_{n+i,j} - 1_{n+j,i}] =(1_{j,j}-1_{n+j,n+j})(1_{n+i,j} - 1_{n+j,i}) - (1_{n+i,j} - 1_{n+j,i})(1_{j,j}-1_{n+j,n+j}) = -1_{n+i,j} + 1_{n+j,i} $}
{$ [H_i, X_{n+i,n+j}] = (-L_i+L_j)(H_i)X_{n+i,n+j}=-X_{n+i,n+j}$}
- {$ [1_{i,i}-1_{n+i,n+i},1_{n+i,n+j}-1_{j,i}] =(1_{i,i}-1_{n+i,n+i})(1_{n+i,n+j}-1_{j,i}) - (1_{n+i,n+j}-1_{j,i})(1_{i,i}-1_{n+i,n+i}) = -1_{n+i,n+j}+1_{j,i} $}
{$ [H_j, X_{n+i,n+j}] = (-L_i+L_j)(H_j)X_{n+i,n+j}=X_{n+i,n+j}$}
- {$ [1_{j,j}-1_{n+j,n+j},1_{n+i,n+j}-1_{j,i}] =(1_{j,j}-1_{n+j,n+j})(1_{n+i,n+j}-1_{j,i}) - (1_{n+i,n+j}-1_{j,i})(1_{j,j}-1_{n+j,n+j}) = 1_{n+i,n+j}-1_{j,i} $}
These are all of the roots if {$m=2n$}. (Explain why). Suppose that {$m=2n+1$}. Then we have an additional generator {$H_$} of {$U$} and {$u^u=0$}. We additionally have the following eigenvectors {$X_{i,2n+1}=1_{i,2n+1}$} and {$X_{n+i,2n+1}$}.
{$ [H_i, X_{i,2n+1}] = L_i(H_i)X_{i,2n+1}=X_{i,2n+1}$}
- {$ [1_{i,i}-1_{n+i,n+i},1_{i,2n+1}] =(1_{i,i}-1_{n+i,n+i})(1_{i,2n+1}) - (1_{i,2n+1})(1_{i,i}-1_{n+i,n+i}) = +1_{i,2n+1} $}
{$ [H_i, X_{n+i,2n+1}] = -L_i(H_i)X_{n+i,2n+1}=-X_{i,2n+1}$}
- {$ [1_{i,i}-1_{n+i,n+i},1_{n+i,2n+1}] =(1_{i,i}-1_{n+i,n+i})(1_{n+i,2n+1}) - (1_{n+i,2n+1})(1_{i,i}-1_{n+i,n+i}) = -1_{n+i,2n+1} $}
Exterior algebra
José Figueroa-O’Farrill. Spin Geometry. Section 1.3.1 explains the vector space isomorphism between the exterior algebra {$\wedge^\bullet V$} to the complex Clifford algebra {$Cl(V)$}. Map generators {$f_j\in\wedge^\bullet V$} to generators {$e_j\in Cl(V)$}. And map monomials {$f_1\wedge\cdots\wedge f_k$} to the symmetric function {$\frac{1}{p!}\sum_{\sigma\in S_k}\textrm{sgn}(\sigma)e_{i_{\sigma(1)}}\cdots e_{i_{\sigma(k)}}$}.
Section 1.4.1 explains that the Clifford algebra can be understood as the quantisation of an exterior algebra.
Chevalley action
I like Shlomo Sternberg's approach in his Section 9.1.3. and Alex explains a key detail.
Vector space {$V$} has a non-degenerate symmetric bilinear form {$B$}. Then {$\wedge^\bullet V$} inherits this bilinear form as follows.
- If {$k\neq l$}, then {$\wedge^k V$} and {$\wedge^l V$} are orthogonal, which is to say, {$w_1\in\wedge^k V, w_2\in\wedge$} implies {$(w_1,w_2)=0$}.
- {$(x_1\wedge\cdots\wedge x_k, y_1\wedge\cdots\wedge x_k)=\textrm{det}((x_i,y_j))$}
We define the action of {$V$} on {$\wedge^\bullet V$} as the sum of exterior multiplication {$\epsilon_v$} and interior multiplication {$\iota_v$}.
{$\epsilon_v(1)\equiv v$} and {$\epsilon_v(v_1\wedge\cdots\wedge v_k)\equiv v\wedge v_1\wedge\cdots\wedge v_k$}
{$\iota_v(1)\equiv 0$} and {$\iota_v(v_1\wedge\cdots\wedge v_k)\equiv \sum_j=1^k (-1)^{j-1}(v,v_j)_V \wedge v_1\wedge\hat{v}_j\cdots\wedge v_k$}
where {$\hat{v}_j$} means that {$v_j$} is omitted from the product.
Thus, for example, if our bilinear form defines {$(a_j,a_k)=\delta_{j+n,k}, j]leq k$}, we have {$\iota_{a_j}(a_1\wedge\cdots\wedge a_{2n} = (-1)^{j-1}a_1\wedge\cdots\wedge\hat{a}_{n+j}\wedge\cdots\wedge a_{2n}$}.
Thus we have an action {$V\rightarrow\textrm{End}(\wedge^\bullet V), v\rightarrow \epsilon(v)+\iota(v)$}.
Then for any two vectors {$v,w\in V$} and any monomial {$x=x_1\wedge\cdots\wedge x_k\in\wedge^\bullet V$} we have
{$\epsilon_w(\iota_v(x))=w\wedge\iota_v(x)$}
{$\iota_w(\epsilon_v(x))=\iota_w(v\wedge x_1\wedge\cdots\wedge x_k)=(w,v)x - w\wedge\iota_w(x)$}
Consequently, {$\iota_w(\epsilon_v(x)) + \epsilon_w(\iota_v(x)) = (w,v)x$}
And in particular, {$\iota_v(\epsilon_v(x)) + \epsilon_v(\iota_v(x)) = (v,v)x$}
Thus {$\iota_v\epsilon_v + \epsilon_v\iota_v = (v,v)$}
Note that {$\epsilon_v\epsilon_v=0$} and {$\iota_v\iota_v=0$}.
Consequently, {$(\epsilon(v)+\iota(v))^2=\epsilon(v)\epsilon(v)+\epsilon(v)\iota(v)+\iota(v)\epsilon(v)+\iota(v)\iota(v)=\epsilon(v)\iota(v)+\iota(v)\epsilon(v) = (v,v)I$}
So the map {$v\rightarrow\epsilon(v)+\iota(v)$} is a Clifford map. It extends to a homomorphism {$C(V)\rightarrow\textrm{End}(\wedge^\bullet V)$}.
This means that {$\wedge^\bullet V$} is a {$C(V)$} module.
Note that the Clifford algebra {$C(V)$} and the exterior algebra {$\wedge^\bullet V$} have the same dimension as vector spaces.
Consider the element {$1\in\wedge^0V\subset\wedge^\bullet$} in the exterior algebra. And consider how products of vectors in {$C(V)$} act upon it as described above. We have
{$v_4:1\rightarrow v_4$}
{$v_3v_4:1\rightarrow v_3\wedge v_4 + (v_3,v_4)1$}
{$v_2v_3v_4: 1\rightarrow v_2\wedge v_3\wedge v_4 + (v_2,v_3)v_4 - (v_2,v_4)v_3 + (v_3,v_4)v_2$}
{$v_1v_2v_3v_4: 1\rightarrow v_1\wedge v_2\wedge v_3\wedge v_4 + (v_1,v_2)v_3\wedge v_4 - (v_1,v_3)v_2\wedge v_4 + (v_1,v_4)v_2\wedge v_3$}{$ + (v_2,v_3)v_1\wedge v_4 + (v_1,v_4)(v_2,v_3) - (v_2,v_4)v_1\wedge v_3 - (v_1,v_3)(v_2,v_4) + (v_3,v_4)v_1\wedge v_2 + (v_1,v_2)(v_3,v_4)$}
Note that this generates the paths given by sequences (or products) of raising and lowering operators {$(x+\frac{\textrm{d}}{\textrm{dx}})(x+\frac{\textrm{d}}{\textrm{dx}})(x+\frac{\textrm{d}}{\textrm{dx}})\cdots$} where raising the power yields one term but lowering the power {$x^k$} yields {$k$} terms. This is all acting on the initial {$1$}.
Thus we have {$(x+\frac{\textrm{d}}{\textrm{dx}})1 = x$}
{$(x+\frac{\textrm{d}}{\textrm{dx}})x = x^2+1$}
{$(x+\frac{\textrm{d}}{\textrm{dx}})(x^2+1) = x^3 + 2x + x = x^3 + 3x$}
{$(x+\frac{\textrm{d}}{\textrm{dx}})(x^3 + 3x) = x^4 + 3x^2 + 3x^2 + 3 = x^4+6x^2+3$}
{$(x+\frac{\textrm{d}}{\textrm{dx}})(x^4+6x^2+3) = x^5 + 4x^3 + 6x^3 + 12x + 3x = x^5+10x^3+15x$}
These encode involutions as do the Hermite polynomials. The power of {$x$} gives the number of fixed points in the involution. And the number of paired elements is weighted by {$i^2=-1$}. This is also the number of standard Young tableaux with {$n$} cells. See the OEIS sequence A000085. Note that the Hermite polynomials include negatives signs. The terms resulting from the Chevalley map yield their own negative signs (with each differentiation) which would lead to terms cancelling out (if they weren't all different).
If there is a lowering operator, then there must have been a raising operator, and so they are paired. And then there may be raising operators left over, which are the fixed points and the powers. So this is expressing the process of construction. The pairs are shifts in perspective. A perspective is introduced (by the raising operator) and the shift in perspective is due to the lowering operator.
This defines a second product {$xy$} on the exterior algebra aside from the wedge product {$x\wedge y$}. Consider how they differ.
{$(b_1x_1 + b_2x_2)\wedge (c_1x_1 + c_2x_2) = b_1c_2x_1\wedge x_2 + b_2c_1x_2\wedge x_1 = (b_1c_2-b_2c_1)x_1\wedge x_2$}
{$(b_1x_1 + b_2x_2)(c_1x_1 + c_2x_2) = (b_1x_1 + b_2x_2)\wedge (c_1x_1 + c_2x_2) + \iota(b_1x_1 + b_2x_2)(c_1x_1 + c_2x_2)$}
{$=(b_1c_2-b_2c_1)x_1\wedge x_2 + (b_1c_1 + b_2c_2)$}
And the second term is the bilinear form {$(x,y)$}. It goes away when {$x$} and {$y$} are orthogonal. In that case, the two products are the same. Note that the bases are orthogonal when we are within {$W$} or within {$W'$}. But in the broader context of {$V$} we have {$(a_i,a_{n+i})=1$} and then the two products behave differently.
I need to read this further.
I also need to study the binary encoding.
Representation
Isomorphic representations
{$S$} and {$S^*$} are vector spaces over {$\mathbb{C}$} equipped with group representations {$\phi$} and {$\phi^*$} of the group {$\textrm{Spin}(n)$}. They are isomorphic representations if there exists an invertible linear map {$\alpha :S\rightarrow S^*$} such that {$\alpha (\phi(g)\cdot s)=\phi^*(g)\cdot \alpha (s)$} for all {$g\in G$} and {$s\in S$}. This means that {$\alpha \circ \phi(g)=\phi^*(g)\circ\alpha$}.
{$S$} and {$S^*$} are also equipped with dual Lie algebra representations {$\pi$} and {$\pi^*$} of the Lie algebra {$\frak{so}$}{$(n)$}. We have that {$\pi^*(X)=-\pi(X)^T$} for all {$X\in\frak{so}$}{$(n)$}. The weights of the dual representation are the negatives of the weights of the original representation.
{$\pi$} and {$\pi^*$} are isomorphic if there is an isomorphism {$B:S\rightarrow S^*$} such that {$B(X\cdot s)=X\cdot B(s)$} for all {$x\in\frak{so}$}{$(n), s\in S$}. This means that {$B(\pi(X)s)=\pi^*(X)B(s)$}, which means {$B(\pi(X)s)=-\pi(X)^TB(s)$}, which means {$B(\pi(X)s)=-(B(s)^T\pi(X))^T$}. Here the transposition simply converts a column vector into a row vector so that it can be multiplied on the right, and then converts it back to a column vecttor. So the equation says that {$\pi(X)$} acts on the left of a column vector {$s$}, after transformation by {$B$}, as the negative of how {$\pi(X)$} acts on the right of the corresponding row vector {$B(s)$}. Thus we have one orientation from positive to negative and a dual orientation from negative to positive. And the negative can be interpreted as the inverse within the Lie group.
When {$n$} is odd, then the operator {$-I$} is in the Weyl group. The weights of {$S$} and {$S^*$} include the negatives of their weights. So the weights are invariant under the map {$\mu\rightarrow -\mu$}. {$S$} and {$S^*$} are irreducible and thus they are isomorphic to each other, their duals.
But when {$n$} is even, then {$S$} breaks up into two irreducible representations {$S_+=\wedge^{\textrm{even}}W$}, where each weight has an even number of minus signs, and {$S_-=\wedge^{\textrm{odd}}W$}, where each weight has an odd number of minus signs.
- Then if {$n=4k$}, then {$W$} has dimension {$2k$} and so if there is an even number of minus signs, then there is an even number of plus signs, which means that {$S_+$} is isomorphic to {$S_-^*$}. And if there is an odd number of minus signs, then there is an odd number of plus signs, which means that {$S_-$} is isomorphic to {$S_-^*$}.
- Whereas if {$n=2k+2$}, then {$W$} has dimension {$2k+1$} and so if there is an even number of minus signs, then there is an odd number of plus signs. And if there is an odd number of minus signs, then there is an even number of plus signs. So {$S_+$} and {$S_+^*$} are not isomorphic, and {$S_-$} and {$S_-^*$} are not isomorphic. However, I think their combinations {$S$} and {$S^*$} are isomorphic, which is what matters to me.
Dual vector space
Given the vector space, which is the spinor space {$\wedge^\bullet W$}, I need to understand how to specify the dual vector space.
Dual representation
The vector space {$W$} generated by {$a_1,\cdots,a_n$} and its dual vector space {$W^*$} generated by {$\bar{a_1},\cdots,\bar{a_n}$} are related by the bilinear form {$\langle w, w'\rangle$} for {$w\in W, w'\in W^*$}.
Recall that, in our case,
{$\langle w_1a_1+\cdots + w_na_n, w'_1\bar{a_1}+\cdots w'_n\bar{a_n}\rangle = \begin{pmatrix} w_1 & \cdots & w_n \\ \end{pmatrix}\begin{pmatrix} 0 & I_n \\ I_n & 0 \\ \end{pmatrix}\begin{pmatrix} w_1' \\ \vdots \\ w_n' \\ \end{pmatrix} = w_1w_1'+\cdots w_nw_n'$}
Truly, these vectors are embedded in {$V$} and so we have
{$\langle w_1a_1+\cdots + w_na_n + w_{n+1}a_{n+1} + \cdots + w_{2n}a_{2n}, w'_{n+1}\bar{a_{n+1}}\cdots + w'_{2n}\bar{a_{2n}}+ w'_1\bar{a_1}+\cdots w'_n\bar{a_n}\rangle = w_{n+1}w'_{n+1}\cdots w_{2n}w'_{2n} + w_1w'_1\cdots w_nw'_n$}
where {$a_{n+i}$} functions as {$\bar{a}_i$} and {$\bar{a}_{n+i}$} functions as {$a_i$}.
The dual representation has weights that are the negatives of the weights of the representation.
Note that in our representation, {$a_i\wedge a_{n+j}$} maps to {$2X_{ij}=2(1_{i,j}-1_{n+j,n+i})$}, with root {$L_i-L_j$}, whereas {$a_{n+i}\wedge a_j$} maps to {$2X_{n+i,n+j}$}, with root {$-L_i+L_j$}.
And {$a_i\wedge a_j$} maps to {$2X_{i,n+j}$} with root {$L_i+L_j$} whereas {$a_{n+i}\wedge a_{n+j}$} maps to {$2X_{n+i,j}$} with root {$-L_i-L_j$}.
Isomorphism
José Figueroa-O’Farrill. Spin Geometry. Section 1.4.4 explains that the bilinear form defines the musical isomorphisms.
Math Stack Exchange. Understanding the Musical Isomorphisms in Vector Spaces.
Bilinear form
Note that the number of swaps to invert {$n$} items is equal to the number of blocks to add to parts to ensure that they are all distinct. The number of swaps assumes that each item is different so that they anticommute rather than commute. So the number of swaps is likewise ensuring that all of the dancers are distinct. It is the number of distinct pairs. And it relates to the original orthogonality relation {$Q^TQ=I$} and the issue of whether or not the off-diagonal and diagonal equations fit together nicely.
Vistoli describes two bilinear forms, the canonical pairings.
- {$\beta(x,y)=\int x^t\wedge y$} is based on the reversing anti-automorphism.
- {$\bar{\beta}(x,y)=\int \bar{x}\wedge y$} is based on conjugation, which reverses and also swaps all the signs of the generators.
These are defined with regard to the dimension {$m$} of {$W$}.
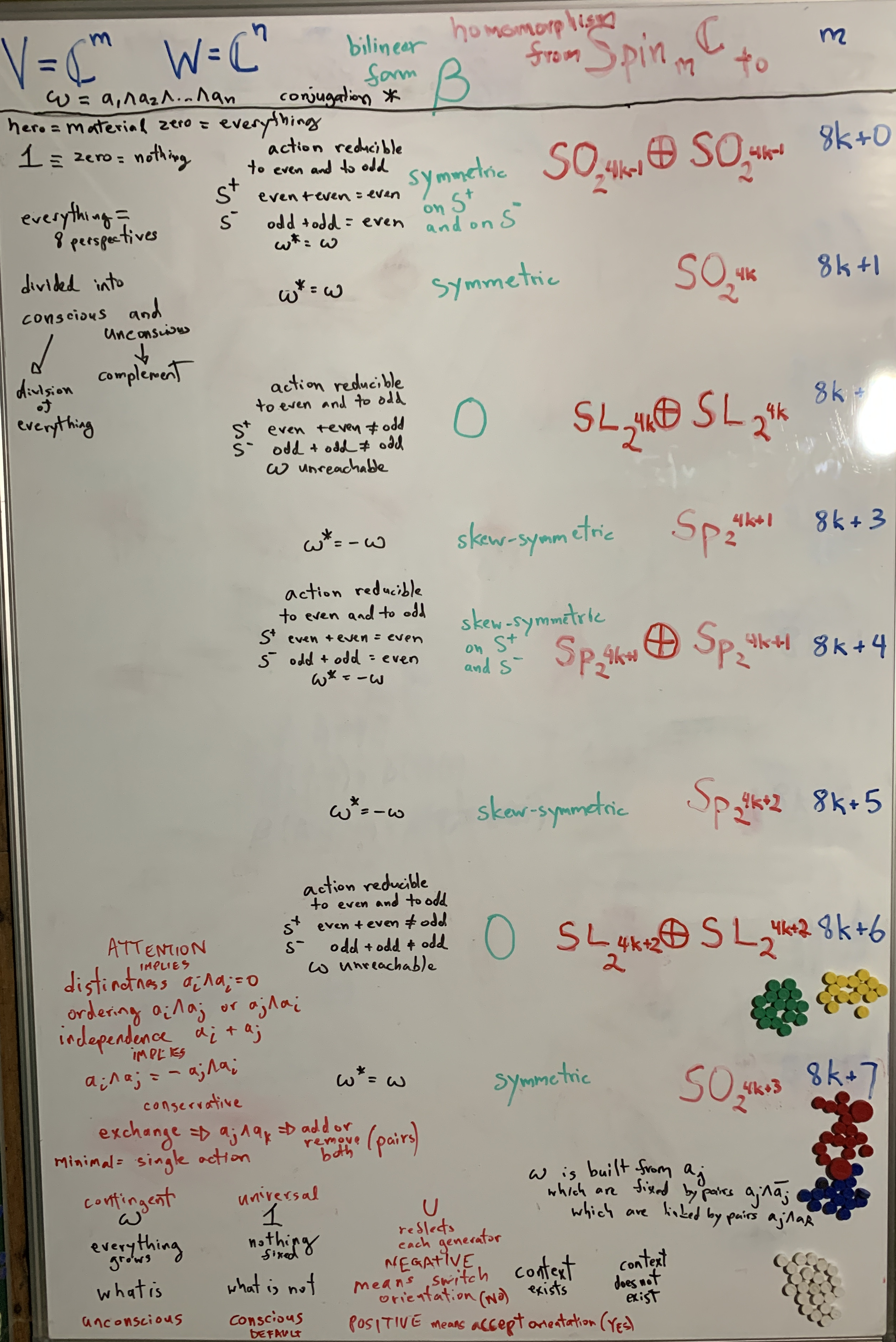
- {$m\equiv 0 \mod 4$} Then {$\beta$} and {$\bar{\beta}$} are both symmetric.
- {$m\equiv 1 \mod 4$} Then {$\beta$} is symmetric and {$\bar{\beta}$} is alternating.
- {$m\equiv 2 \mod 4$} Then {$\beta$} and {$\bar{\beta}$} are both alternating.
- {$m\equiv 3 \mod 4$} Then {$\beta$} is alternating and {$\bar{\beta}$} is symmetric.
Thus when {$m$} is odd, one is symmetric and the other is alternating, and they are in fact zero on {$\wedge^+W\times\wedge^+W$} and {$\wedge^-W\times\wedge^-W$}. But they both give non-degenerate pairings, where they agree on {$\wedge^+W\times\wedge^-W\rightarrow\mathbb{C}$} and they differ by sign on {$\wedge^-W\times\wedge^+W\rightarrow\mathbb{C}$}, which is just the transpose of the other pairing.
Volume element
The volume element is the pseudoscalar given by {$\omega = a_1\wedge a_2\wedge\cdots\wedge a_m$}.
We consider conjugation {$\omega^*=(-a_m)\wedge (-a_{m-1})\wedge\cdots\wedge (-a_1)$}.
If {$\omega^*=\omega$}, then the bilinear form is symmetric and the matrices are symplectic.
If {$\omega^*=-\omega$}, then the bilinear form is antisymmetric (alternating, skew-symmetric) and the matrices are orthogonal.
Tensor square combinatorics
Understand this
- The tensor square {$S\otimes S$} must decompose into a direct sum of {$k$}-forms on {$V$} for various {$k$}, because its weights are all elements in {$h^∗$} whose components belong to {$\{−1,0,1\}$}.
Metaphysical interpretation
The division of everything into {$n$} perspectives is structured by {$m$} shifts of perspective and possibly one perspective left over. The left over perspective is the vantage point of consciousness.
Each shift in perspective moves us from a conscious perspective to an unconscious perspective.
We have three vantage points on the division. They take us from an initial frame (bookend) to a final frame (bookend).
- Unconscious is the reversing antiautomorphism. Signs arise from anticommutation.
- Conscious is the conjugating antiautomorphism. Signs arise from anticommutation and reflection.
- Consciousness is the involution automorphism. Signs arise from reflection. (This is like combining the other two, going forwards in one and backwards in the other).
Earlier notes: Quadratic Form and Bilinear Form
Quadratic form {$Q$} and bilinear form {$B$}
Define the {$n$}-dimensional complex vector space {$V$}. Pair up its basis elements, with an extra basis element {$u$} if {$n=2m+1$} is odd, and {$u=0$} is {$n=2m$} is even.
{$V=\langle x_1,y_1,\cdots,x_m,y_m,u \rangle$}
Define the quadratic form {$Q$} on {$V$} with {$Q(x_j)=1,Q(y_j)=1, Q(u)=0$}, for all {$j, 1\leq j\leq m$}.
The polarization identities associate to {$Q$} a bilinear form {$\langle\;,\;\rangle$}
| {$\langle v, w\rangle = \frac{1}{2}(Q(v+w)-Q(v)-Q(w))$} | {$=\frac{1}{2}(Q(v)+Q(w)-Q(v-w))$} | {$=\frac{1}{4}(Q(v+w)-Q(v-w))$} |
If we want {$\langle x_j, y_k\rangle=0$}, then {$Q(x_j+y_k)=Q(x_j)+Q(y_k)=2$}. Similarily, for {$j\neq k$}, we have {$Q(x_j+x_k)=Q(x_j)+Q(x_k)=2$}. This means that the Pythagorean theorem holds for any two basis elements {$e_j, e_k$}: the square of the sum equals the sum of the squares. Then the matrix {$B_{ij}=\langle e_j, e_k \rangle$} of the bilinear form is given by the identity matrix {$B=I$}, namely {$\langle u,v\rangle = u^TIv=u^Tv$}.
Isotropic basis
Note that {$Q(x_j+iy_j)=Q(x_j)+i^2Q(y_j)=Q(x_j)-Q(y_j)=1-1=0$} because {$x_j, y_j$} are distinct basis elements.
We want to define elements such that {$\langle k(x_s+iy_s), k(x_t-iy_t) \rangle = \delta_{s,t}$}. When {$s\neq t$}, then {$\langle k(x_s+iy_s), k(x_t-iy_t) \rangle = \frac{1}{2}k^2(Q(x_s+x_t+iy_s-iy_t)-Q(x_s+iy_s)-Q(x_t-iy_t))=\frac{1}{2}k^2(Q(x_s)+Q(x_t)+i^2Q(y_s)+i^2Q(y_t))=0$}. When {$s=t$}, then {$\langle k(x_s+iy_s), k(x_s-iy_s) \rangle = \frac{1}{2}k^2(Q(2x_s)-Q(x_s+iy_s)-Q(x_s-iy_s))=\frac{1}{2}(4)k^2=2k^2$}. So we need to set {$k=\frac{\sqrt 2}{2}$}.
{$a_j=\frac{\sqrt 2}{2}(x_j + iy_j)$}
{$\bar{a}_j=\frac{\sqrt 2}{2}(x_j - iy_j)$}
{$x_j=\frac{\sqrt 2}{2}(a_j+\bar{a}_j)$}
{$y_j=\frac{\sqrt 2}{2}i(\bar{a}_j-a_j)$}
Let us focus on the case {$n=2m$}, which is to say, let us momentarily ignore the basis element {$u$}, {$Q(u)=0$}, which is only relevant in the odd case.
{$\langle a_j,\bar{a}_k\rangle =\delta_{j,k}$}.
- For if {$j\neq k$}, then {$\langle a_j,\bar{a}_k\rangle = \langle \frac{\sqrt{2}}{2}( x_j + iy_j), \frac{\sqrt{2}}{2}(x_k-iy_k)\rangle = \frac{1}{2}(\langle x_j,x_k\rangle - i\langle x_j,y_k\rangle + i\langle y_j,x_k\rangle +\langle y_j,y_k\rangle)=0$}.
- And if {$j=k$}, then {$\langle a_j,\bar{a}_j\rangle = \langle \frac{\sqrt{2}}{2}( x_j + iy_j), \frac{\sqrt{2}}{2}(x_j-iy_j)\rangle = \frac{1}{2}(\langle x_j,x_j\rangle - i\langle x_j,y_j\rangle + i\langle y_j,x_j\rangle +\langle y_j,y_j\rangle) = \frac{1}{2}(1+0+0+1)=\frac{1}{2}2=1$}.
We can write the bilinear form in terms of the basis {$\{a_1,\cdots a_m,\bar{a}_1,\cdots,\bar{a}_m\}$}. If we order them in this manner, then the bilinear form is {$\langle u,v\rangle=u^TBv$} where
{$B=\begin{pmatrix} 0 & I \\ I & 0 \\ \end{pmatrix}$}
Note that a different ordering of the basis elements would yield a permutation of {$B$}. Kac uses {$\{a_1,\cdots a_m,\bar{a}_m,\cdots,\bar{a}_1\}$} and thus for him, {$B$} is the matrix with {$1$}s on the anti-diagonal. That can be notationally convenient in unifying the even case {$n=2m$} and the odd case {$n=2m+1$} in that {$u$} appears in the center and, so to speak, pairs with itself.
We can show the relationship between the bases {$\{f_1,\cdots, f_{2m}\}=\{x_1,\cdots,x_m,y_1,\cdots,y_m\}$} and {$\{e_1,\cdots,e_{2m}\}=\{a_1,\cdots,a_m,\bar{a}_1,\cdots,\bar{a}_m\}$} which are related as {$f_j=\sum_{k=1}^{2m} e_kS_{k,j}$}, specifically {$x_j=\frac{\sqrt{2}}{2}e_j +\frac{\sqrt{2}}{2}e_{m+j}, y_j=\frac{\sqrt{2}}{2}ie_{m+j}-\frac{\sqrt{2}}{2}ie_j$}. Thus we have
{$S=\frac{\sqrt{2}}{2}\begin{pmatrix} I & -iI \\ I & iI \\ \end{pmatrix}$}
The change of basis gives a new matrix {$S^TBS$} for the bilinear form, namely {$I$}:
{$\frac{\sqrt{2}}{2}\begin{pmatrix} I & I \\ -iI & iI \\ \end{pmatrix}\begin{pmatrix} 0 & I \\ I & 0 \\ \end{pmatrix}\frac{\sqrt{2}}{2}\begin{pmatrix} I & -iI \\ I & iI \\ \end{pmatrix}=\frac{1}{2}\begin{pmatrix} I & I \\ iI & -iI \\ \end{pmatrix}\begin{pmatrix} I & -iI \\ I & iI \\ \end{pmatrix}=\frac{1}{2}\begin{pmatrix} 2I & 0 \\ 0 & 2I \\ \end{pmatrix}=I$}
And the matrix {$S^{-1}$} enables us to get back from {$I$} to {$B=(S^{-1})^TIS^{-1}$}.
Totally isotropic subspaces {$W$} and {$W^*$}
We define one-dimensional totally isotropic subspaces {$W_j=\langle a_j\rangle, W_j^*=\langle \bar{a}_j\rangle$} and then define maximal totally isotropic subspaces
{$W=\oplus_{j=1}^mW_j, \;\;\; W^*=\oplus_{j=1}^mW^*_j, \;\;\; W\cap W^*=\varnothing$}
In general, from the definition of the bilinear form, when {$B=I$}, for any {$n\times n$} matrix {$A$} we have {$\langle Au,v \rangle=(Au)^TIv=u^TA^Tv=\langle u,A^Tv \rangle$}.
In our case, with {$B=\begin{pmatrix} 0 & I \\ I & 0 \\ \end{pmatrix}$} as above, consider an {$m\times m$} matrix {$A$}, where {$n=2m$}. We want to show that {$\langle Aw,w^*\rangle=\langle w,A^Tw^*\rangle $} for all {$v=w+w^*\in V=W\oplus W^*$}.
{$ \left< \begin{pmatrix} Aw \\ 0 \\ \end{pmatrix}, \begin{pmatrix} 0 \\ w^* \\ \end{pmatrix} \right> = \left< \begin{pmatrix} A & 0 \\ 0 & 0 \\ \end{pmatrix}\begin{pmatrix} w \\ 0 \\ \end{pmatrix}, \begin{pmatrix} 0 \\ w^* \\ \end{pmatrix} \right> = \begin{pmatrix} w & 0 \\ \end{pmatrix}\begin{pmatrix} A^T & 0 \\ 0 & 0 \\ \end{pmatrix}\begin{pmatrix} 0 & I \\ I & 0 \\ \end{pmatrix}\begin{pmatrix} 0 \\ w^* \\ \end{pmatrix} = \begin{pmatrix} w & 0 \\ \end{pmatrix} \begin{pmatrix} 0 & A^T \\ 0 & 0 \\ \end{pmatrix}\begin{pmatrix} 0 \\ w^* \\ \end{pmatrix}$}
{$ = \begin{pmatrix} w & 0 \\ \end{pmatrix} \begin{pmatrix} 0 & I \\ I & 0 \\ \end{pmatrix}\begin{pmatrix} 0 & 0 \\ 0 & A^T \\ \end{pmatrix}\begin{pmatrix} 0 \\ w^* \\ \end{pmatrix} = \left< \begin{pmatrix} w \\ 0 \\ \end{pmatrix}, \begin{pmatrix} 0 & 0 \\ 0 & A^T \\ \end{pmatrix}\begin{pmatrix} 0 \\ w^* \\ \end{pmatrix} \right> = \left< \begin{pmatrix} w \\ 0 \\ \end{pmatrix}, \begin{pmatrix} 0 \\ A^Tw^* \\ \end{pmatrix} \right>$}
Now define {$\rho_A=\begin{pmatrix} A & 0 \\ 0 & -A^T \end{pmatrix}$}. We show below that {$\langle \rho_A u, v \rangle=-\langle u,\rho_A v\rangle $} and thus {$\rho_A$} is skew.
{$ \left< \begin{pmatrix} A & 0 \\ 0 & -A^T \\ \end{pmatrix}\begin{pmatrix} u_+ \\ u_- \\ \end{pmatrix}, \begin{pmatrix} v_+ \\ v_- \\ \end{pmatrix} \right> = \begin{pmatrix} u_+ & u_-\\ \end{pmatrix}\begin{pmatrix} A^T & 0 \\ 0 & -A \\ \end{pmatrix}\begin{pmatrix} 0 & I \\ I & 0 \\ \end{pmatrix}\begin{pmatrix} v_+ \\ v_- \\ \end{pmatrix} = \begin{pmatrix} u_+ & u_-\\ \end{pmatrix}\begin{pmatrix} 0 & A^T \\ -A & 0 \\ \end{pmatrix}\begin{pmatrix} v_+ \\ v_- \\ \end{pmatrix} $}
{$= \begin{pmatrix} u_+ & u_-\\ \end{pmatrix}\begin{pmatrix} 0 & I \\ I & 0 \\ \end{pmatrix}\begin{pmatrix} -A & 0 \\ 0 & A^T \\ \end{pmatrix}\begin{pmatrix} v_+ \\ v_- \\ \end{pmatrix} = \left<\begin{pmatrix} u_+ \\ u_- \\ \end{pmatrix}, \begin{pmatrix} -A & 0 \\ 0 & A^T \\ \end{pmatrix}\begin{pmatrix} v_+ \\ v_- \\ \end{pmatrix} \right> $}
We see that passing {$\rho_A$} across this particular matrix {$B$} flips its values across the anti-diagonal.
Now one curious matter is that {$\rho_A$} is skew but is not given by a skew-symmetrix matrix. This is puzzling because skew-symmetry is a basis independent property. To explain this, note that the matrix of the bilinear form is basis dependent: {$\langle u, v \rangle = u^TBv$}. In our case, the equation {$\langle \rho_A u,v\rangle + \langle u,\rho_A v\rangle = 0$} means {$u^T\rho_A^TB v + u^TB\rho_A v=0$}. We have that
{$\rho_A^TB = \begin{pmatrix} A^T & 0 \\ 0 & -A \\ \end{pmatrix}\begin{pmatrix} 0 & I \\ I & 0 \\ \end{pmatrix} = \begin{pmatrix} 0 & A^T \\ -A & 0 \\ \end{pmatrix}$} and {$\begin{pmatrix} 0 & I \\ I & 0 \\ \end{pmatrix}\begin{pmatrix} A & 0 \\ 0 & -A^T \\ \end{pmatrix}=\begin{pmatrix} 0 & -A^T \\ A & 0 \\ \end{pmatrix}=B\rho_A$}
And we can verify that the resulting matrix {$M=\begin{pmatrix} 0 & A^T \\ -A & 0 \\ \end{pmatrix}$} is skew-symmetric. In particular, {$M_{j,m+k}=(A^T)_{j,k}=A_{kj}$} and {$M_{m+k,j}=-A_{kj}=-M_{j,m+k}$}. We also see that we are only getting a subset of the skew-symmetric matrices, namely those whose diagonal blocks are zero in this block form.
In summary, the particular basis we choose for the bilinear form, and the resulting matrix for that bilinear form, is affecting how we visualize the skew-symmetry indicated by the bilinear form. In general, as Kac notes, the special orthogonal Lie algebra is defined as {$\frak{so}$}{$(n)(\mathbb{F})=\{m\in gl_n(\mathbb{F})\;|\;m^TB+Bm=0\}$} and here {$B$} is the matrix of a bilinear form. We can solve using our chosen {$B$} as follows.
{$\begin{pmatrix} M_{11}^T & M_{21}^T \\ M_{12}^T & M_{22}^T \\ \end{pmatrix}\begin{pmatrix} 0 & I \\ I & 0 \\ \end{pmatrix} + \begin{pmatrix} 0 & I \\ I & 0 \\ \end{pmatrix}\begin{pmatrix} M_{11} & M_{12} \\ M_{21} & M_{22} \\ \end{pmatrix} = 0$}
{$\begin{pmatrix} M_{21}^T & M_{11}^T \\ M_{22}^T & M_{12}^T \\ \end{pmatrix} = - \begin{pmatrix} M_{21} & M_{22} \\ M_{11} & M_{12} \\ \end{pmatrix}$}
{$M_{21}^T=-M_{21}, M_{11}^T=-M_{22}, M_{22}^T=-M_{11}, M_{12}^T=-M_{12}$}
{$M=\begin{pmatrix} A & C \\ D & -A^T \\ \end{pmatrix}$} where {$C$} and {$D$} are skew-symmetric.
{$MB=\begin{pmatrix} A & C \\ D & -A^T \\ \end{pmatrix}\begin{pmatrix} 0 & I \\ I & 0 \\ \end{pmatrix} = \begin{pmatrix} C & A \\ -A^T & D \\ \end{pmatrix}$} and we see that {$MB$} is a skew-symmetric matrix.
It is also helpful to note another way to think of skew-symmetry of {$M$}, which is that {$\langle Mu,u\rangle=0$} for all {$u\in V$}. Applying this to {$\langle M(u+v),u+v\rangle$} yields {$\langle Mu,v \rangle + \langle Mv,u \rangle=0$} and recall that our bilinear form is symmetric.
Can we identify {$\bar{a}_j$} with the functional {$\langle a_j, \cdot \rangle$}?
{$C(V,Q)=\langle 1,x_1,y_1,\cdots \rangle$} is the {$2^N$}-dimensional complex Clifford algebra on {$V$} with quadratic form {$Q$}
Notes from elsewhere that I'm reworking...
Let {$D$} be the superalgebra {$\mathbb{C}(\varepsilon)$} with {$\varepsilon$} odd and {$\varepsilon^2=1$}.
{$C(V_j)=\langle 1,x_j,y_j,x_jy_j,u,ux_j,uy_j,ux_jy_j \rangle\cong \langle 1, u \rangle\otimes\langle 1, x_j, y_j, x_jy_j \rangle\cong \mathbb{C}(\varepsilon)\otimes\textrm{End}(\langle 1, \bar{a}_j \rangle)\cong\textrm{End}_{\mathbb{C}(\varepsilon)}(\mathbb{C}(\varepsilon)\otimes\langle 1, \bar{a}_j \rangle)$}
Representation given by action on {$\bar{a}_j$}
{$W^*_j=\langle \bar{a}_j \rangle $}
{$S'_j = \langle 1, \bar{a}_j \rangle $}
{$1\rightarrow 1, u \rightarrow \varepsilon$}
{$1\rightarrow \begin{pmatrix} 1 & 0 \\ 0 & 1 \\ \end{pmatrix}$}
{$a_j\rightarrow \begin{pmatrix} 0 & 1 \\ 0 & 0 \\ \end{pmatrix}$}
{$\bar{a}_j\rightarrow \begin{pmatrix} 0 & 0 \\ 1 & 0 \\ \end{pmatrix}$}
{$a_j\bar{a}_j\rightarrow \begin{pmatrix} 1 & 0 \\ 0 & 0 \\ \end{pmatrix}$}
{$\bar{a}_ja_j\rightarrow \begin{pmatrix} 0 & 0 \\ 0 & 1 \\ \end{pmatrix}$}
{$a_j^2=\bar{a}_j^2=0$}
{$x_j\rightarrow \begin{pmatrix} 0 & 1 \\ 1 & 0 \\ \end{pmatrix}$}
{$y_j\rightarrow \begin{pmatrix} 0 & -i \\ i & 0 \\ \end{pmatrix}$}
The Lie algebra is generated by the bivectors {$ux_j, uy_j, x_jy_j$}.
{$ux_j\rightarrow \varepsilon\otimes\begin{pmatrix} 0 & 1 \\ 1 & 0 \\ \end{pmatrix}$}
{$uy_j\rightarrow \varepsilon\otimes\begin{pmatrix} 0 & -i \\ i & 0 \\ \end{pmatrix}$}
{$x_jy_j\rightarrow 1\otimes\begin{pmatrix} i & 0 \\ 0 & -i \\ \end{pmatrix}$}
{$y_jx_j\rightarrow 1\otimes\begin{pmatrix} -i & 0 \\ 0 & i \\ \end{pmatrix}$}
This Lie algebra is not abelian. It is semisimple.
The Cartan subalgebra of this Lie algebra can be generated by {$\bar{a}_j\wedge a_j$} which is mapped to {$\frac{1}{4}[\bar{a}_j,a_j]=\frac{1}{4}\bar{a}_ja_j - \frac{1}{4}a_j\bar{a}_j$}. Acting on an arbitrary element {$c_j+d_j\bar{a}_j\in S'$}, and noting the factor {$\sqrt{2}$} in applying a vector, we have {$(\frac{1}{4}\bar{a}_ja_j - \frac{1}{4}a_j\bar{a}_j)(c_j+d_j\bar{a}_j)=(\frac{1}{4}d_j\bar{a}_j - \frac{1}{4}c_j)2$}. This means the action is given by
{$\begin{pmatrix} -\frac{1}{2} & 0 \\ 0 & \frac{1}{2} \\ \end{pmatrix}\begin{pmatrix} c_j \\ d_j \end{pmatrix} = \begin{pmatrix} -\frac{1}{2}c_j \\ \frac{1}{2}d_j \end{pmatrix}$}
The weight spaces are {$S'_+ = \langle 1 \rangle$} with weight {$\lambda_1(h)=-\frac{1}{2}$} and {$ S'_- = \langle \bar{a}_j\rangle $} with weight {$\lambda_{a_j}(h)=\frac{1}{2}$}. The Cartan subalgebra element {$\bar{a}_j\wedge a_j$} has eigenvalue {$-\frac{1}{2}$} on {$\langle 1 \rangle$}, which does not contain {$\bar{a}_j$}, and eigenvalue {$\frac{1}{2}$} on {$\langle \bar{a}_j \rangle$}, which does contain {$\bar{a}_j$}.
Representation given by action on {$a_j$}
{$W_j=\langle a_j \rangle $}
{$S_j = \langle 1, a_j \rangle $}
{$C(V_j)=\langle 1,x_j,y_j,x_jy_j \rangle\cong \textrm{End}(\langle 1, a_j \rangle)$}
{$1\rightarrow \begin{pmatrix} 1 & 0 \\ 0 & 1 \\ \end{pmatrix}$}
{$a_j\rightarrow \begin{pmatrix} 0 & 0 \\ 1 & 0 \\ \end{pmatrix}$}
{$\bar{a}_j\rightarrow \begin{pmatrix} 0 & 1 \\ 0 & 0 \\ \end{pmatrix}$}
{$a_j\bar{a}_j\rightarrow \begin{pmatrix} 0 & 0 \\ 0 & 1 \\ \end{pmatrix}$}
{$\bar{a}_ja_j\rightarrow \begin{pmatrix} 1 & 0 \\ 0 & 0 \\ \end{pmatrix}$}
{$a_j^2=\bar{a}_j^2=0$}
{$x_j\rightarrow \begin{pmatrix} 0 & 1 \\ 1 & 0 \\ \end{pmatrix}$}
{$y_j\rightarrow \begin{pmatrix} 0 & i \\ -i & 0 \\ \end{pmatrix}$}
The Lie algebra is given by the bivectors:
{$x_jy_j\rightarrow \begin{pmatrix} -i & 0 \\ 0 & i \\ \end{pmatrix}$}
{$y_jx_j\rightarrow \begin{pmatrix} i & 0 \\ 0 & -i \\ \end{pmatrix}$}
The Lie algebra is abelian, thus not semisimple. It equals its Cartan subalgebra.
The Cartan subalgebra of the Lie algebra for the spin group can be generated by {$\bar{a}_j\wedge a_j$} which is mapped to {$\frac{1}{4}[\bar{a}_j,a_j]=\frac{1}{4}\bar{a}_ja_j - \frac{1}{4}a_j\bar{a}_j$}. Acting on an arbitrary element {$c_j+d_ja_j\in S$}, and noting the factor {$\sqrt{2}$} in applying a vector, we have {$(\frac{1}{4}\bar{a}_ja_j - \frac{1}{4}a_j\bar{a}_j)(c_j+d_ja_j)=(\frac{1}{4}c_j - \frac{1}{4}d_j)2$}. This means the action is given by
{$\begin{pmatrix} \frac{1}{2} & 0 \\ 0 & -\frac{1}{2} \\ \end{pmatrix}\begin{pmatrix} c_j \\ d_j \end{pmatrix} = \begin{pmatrix} \frac{1}{2}c_j \\ -\frac{1}{2}d_j \end{pmatrix}$}
Alternatively, consider the values above for {$\bar{a}_ja_j$} and {$a_j\bar{a}_j$} and calculate {$\bar{a}_ja_j - a_j\bar{a}_j$}. This will give a value that differs by a multiplicative constant. Note that a Lie algebra representation is always isomorphic to its product with a nonzero scalar.
Note that this is also just a complex constant times the value for {$x_jy_j$}.
The weight spaces are {$\langle 1 \rangle$} and {$\langle a_j \rangle$}. The respective weights are {$\lambda_1(h)=\frac{1}{2}$} and {$\lambda_{a_j}(h)=-\frac{1}{2}$} for {$h\in\frak{h}$}. The Cartan subalgebra element {$\bar{a}_j\wedge a_j$} has eigenvalue {$-\frac{1}{2}$} on {$\langle a_j \rangle$}, which contains {$a_j$}, and eigenvalue {$\frac{1}{2}$} on {$\langle 1 \rangle$}, which does not contain {$a_j$}.
Relating the representations
The Lie algebra for {$\textrm{Spin}(2)$} has a single generator, the bivector {$x_jy_j$}.
The representation {$\bar{\phi}$} based on {$S'=\langle 1,\bar{a}_j\rangle$} sends
{$x_jy_j\rightarrow \begin{pmatrix} i & 0 \\ 0 & -i \\ \end{pmatrix}$}
The representation {$\phi$} based on {$S=\langle 1, a_j \rangle$} sends
{$x_jy_j\rightarrow \begin{pmatrix} -i & 0 \\ 0 & i \\ \end{pmatrix}$}
Thus these are dual representations. {$\phi(x_jy_j)=-\bar{\phi}(x_jy_j)^T$} and {$\bar{\phi}(x_jy_j)^T=-\phi(x_jy_j)$}.
Note also that the values of the dual representation is given by the value on {$y_jx_j$}, which is to say, the value in the opposite Clifford algebra.
The weight {$\lambda_1(h) = \frac{1}{2}$} of {$S_+=\langle 1 \rangle$} is the negative of the weight {$-\lambda_1(h)=\lambda_{a_j}(h) = -\frac{1}{2}$} of {$S_-=\langle a_j \rangle$}.
The weight {$\lambda_{\bar{a}_j}(h)=\frac{1}{2}$} of {$S'_-=\langle \bar{a}_j \rangle$} is the negative of the weight {$\lambda_1(h)=-\frac{1}{2}$} of {$S'_+=\langle 1 \rangle$}.
There is an isomorphism from {$S_+=\langle 1 \rangle$} to {$S'_-=\langle \bar{a}_j \rangle$}, unique up to scale. And there is an isomorphism from {$S_-=\langle a_j \rangle$} to {$S'_+=\langle 1 \rangle$}, unique up to scale.
This can be interpreted to identify the lack of a concept with the existence of a context, and the existence of a concept with the lack of a context.
The isomorphisms can be established by calculating what {$B:S\rightarrow S'$} must be, {$B:\langle 1, a_j \rangle \rightarrow \langle 1, \bar{a}_j \rangle$}. This is a homomorphism if it is {$\frak{spin}(2)$} equivariant so that {$B(X\cdot s)=X\cdot B(s)$} for any {$X\in\frak{spin}(2),$}{$s\in S$}. Let {$X=k_jx_jy_j, s=c_j+d_ja_j$} with {$k_j,c_j,d_j\in\mathbb{C}$}. Then {$B(k_jx_jy_j\cdot(c_j+d_ja_j))=k_jx_jy_j\cdot B(c_j+d_ja_j)$}. Substituting the matrix for {$x_jy_j$} and writing {$B$} as a matrix we have
{$\begin{pmatrix} b_{11} & b_{12} \\ b_{21} & b_{22} \\ \end{pmatrix}\begin{pmatrix} k_ji & 0 \\ 0 & -k_ji \\ \end{pmatrix}\begin{pmatrix} c_j \\ d_j \\ \end{pmatrix}=\begin{pmatrix} -k_ji & 0 \\ 0 & k_ji \\ \end{pmatrix}\begin{pmatrix} b_{11} & b_{12} \\ b_{21} & b_{22} \\ \end{pmatrix}\begin{pmatrix} c_j \\ d_j \\ \end{pmatrix}$}
{$k_ji\begin{pmatrix} b_{11} & -b_{12} \\ b_{21} & -b_{22} \\ \end{pmatrix}\begin{pmatrix} c_j \\ d_j \\ \end{pmatrix}=k_ji\begin{pmatrix} -b_{11} & -b_{12} \\ b_{21} & b_{22} \\ \end{pmatrix}\begin{pmatrix} c_j \\ d_j \\ \end{pmatrix}$}
We get {$b_{11}=0, b_{22}=0$}. Thus we can specify the isomorphism as {$B=\begin{pmatrix} 0 & b_{01} \\ b_{10} & 0 \\ \end{pmatrix}$} with any nonzero {$b_{01},b_{10}\in\mathbb{C}$}.
Nondegenerate bilinear form {$\beta$}
Given {$B$}, we define {$\beta(\phi,\psi)=B(\phi)(\psi)$} on {$\phi,\psi\in S=\langle 1, a_j\rangle$}. Let {$\phi = \phi_0 + \phi_1a_j, \psi= \psi_0+\psi_1a_j$}, then we calculate {$(B\phi)^T\psi = \phi^TB^T\psi$}
{$\begin{pmatrix} \phi_0 & \phi_1 \\ \end{pmatrix}\begin{pmatrix} 0 & b_{10} \\ b_{01} & 0 \\ \end{pmatrix}\begin{pmatrix} \psi_0 \\ \psi_1 \\ \end{pmatrix} = \phi_1b_{01}\psi_0 + \phi_0b_{10}\psi_1$}
We want invariance: {$\beta(\xi\cdot\phi,\psi)+\beta(\phi,\xi\cdot\psi)=0$} where {$\xi=kx_jy_j\in\frak{so}$}{$(2)$}. We have {$\xi= \begin{pmatrix} -ki & 0 \\ 0 & ki \\ \end{pmatrix}$}, {$\xi\cdot\phi= \begin{pmatrix} -ki\phi_0 \\ ki\phi_1 \\ \end{pmatrix}$}, {$\xi\cdot\psi= \begin{pmatrix} -ki\psi_0 \\ ki\psi_1 \\ \end{pmatrix}$}
Indeed: {$ki[(\phi_1b_{01}\psi_0 - \phi_0b_{10}\psi_1) + (-\phi_1b_{01}\psi_0 + \phi_0b_{10}\psi_1)]=0$}
Antiautomorphism {$\tau$}
Furthermore, we seek an antiautomorphism {$\tau$} of {$Cl_n\mathbb{C}$} such that {$\beta(A\cdot \phi, \psi)=\beta(\phi,\tau(A)\cdot\psi)$} for all {$A\in Cl_n\mathbb{C}=\langle 1, x_j, y_j, x_jy_j\rangle$}. This will force {$b_{01}=b{10}=b$}. Recall that:
{$x_j = \begin{pmatrix} 0 & 1 \\ 1 & 0 \\ \end{pmatrix}, y_j = \begin{pmatrix} 0 & i \\ -i & 0 \\ \end{pmatrix}, x_jy_j = \begin{pmatrix} -i & 0 \\ 0 & i \\ \end{pmatrix}$}
Consequently,
{$x_j\begin{pmatrix} \phi_0 \\ \phi_1 \\ \end{pmatrix} = \begin{pmatrix} \phi_1 \\ \phi_0 \\ \end{pmatrix}, y_j\begin{pmatrix} \phi_0 \\ \phi_1 \\ \end{pmatrix} = \begin{pmatrix} i\phi_1 \\ -i\phi_0 \\ \end{pmatrix}, x_jy_j\begin{pmatrix} \phi_0 \\ \phi_1 \\ \end{pmatrix} = \begin{pmatrix} -i\phi_0 \\ i\phi_1 \\ \end{pmatrix}$}
Then
{$\beta(\phi,\psi) = b(\phi_0\psi_1 + \phi_1\psi_0)$}
{$\beta(x\cdot\phi,\psi) = b(\phi_1\psi_1 + \phi_0\psi_0) = \beta(\phi,x\cdot\psi)$}
{$\beta(y\cdot\phi,\psi) = b(i\phi_1\psi_1 - i\phi_0\psi_0) = \beta(\phi,y\cdot\psi)$}
{$\beta(xy\cdot\phi,\psi) = b(-i\phi_0\psi_1 + i\phi_1\psi_0) = \beta(\phi,yx\cdot\psi)$}
We thus have that {$\tau(x)=x, \tau(y)=y, \tau(xy)=\tau(y)\tau(x)=yx$}.
Symmetry properties of {$\beta$}
Note that {$\beta(\phi,\psi) = b(\phi_0\psi_1 + \phi_1\psi_0) = \beta(\psi,\phi)$}.
Consider for {$A\in\wedge^kV$} what is the sign {$\varepsilon_k$} such that {$\beta(A\cdot\phi,\psi)=\varepsilon_k\beta(A\cdot\psi,\phi)$}.
We have {$\varepsilon_0=1$} because {$\beta(\phi,\psi)=\beta(\psi,\phi)$}
{$\beta(x_j\cdot\phi,\psi)=\beta(\phi,\tau(x_j)\cdot\psi)=\beta(\phi,x_j\cdot\psi)=\beta(x_j\cdot\psi,\phi)$} thus {$\varepsilon_1=0$}.
{$\beta(x_jy_j\cdot\phi,\psi)=\beta(\phi,\tau(x_jy_j)\cdot\psi)=\beta(\phi,y_jx_j\cdot\psi)=\beta(y_jx_j\cdot\psi,\phi)=-\beta(x_jy_j\cdot\psi,\phi)$} thus {$\varepsilon_2=-1$}.
No roots
This Lie algebra is abelian. Thus it has no roots and it has no Weyl group.
Lie group
{$SO(2)$} is abelian. Consequently, the exponential map {$\textrm{exp}:\frak{so}$}{$(2)\rightarrow SO(2)$} is a surjective group homomorphism.
{$SO(2)\cong\{\begin{pmatrix} e^{-ik} & 0 \\ 0 & e^{ik} \\ \end{pmatrix} |\; k\in\mathbb{R}\}$}
Conclusion
The action is defined in terms of adding a concept, going from {$1$} to {$a_i$}, or filling a context, removing it, going from {$\bar{a}_i$} to {$1$}. The product {$x_jy_j$} sets an axis {$x_j$} as an absolute reference and then, with regard to it, rotates away from it in the one direction {$iy_j$} or in the opposite direction {$\bar{i}y_j$}